
GNSS SYSTEMS
Abstract
Global Navigation Satellite Systems (GNSS), such as GPS (USA), Galileo (Europe), GLONASS (Russia), BeiDou (China), NAVIC (India), and QZSS (Japan), provide essential Positioning, Navigation, and Timing (PNT) services worldwide. These systems have transformed industries like transportation, telecommunications, surveying, and disaster management, becoming indispensable in modern technology. While standard GNSS offers 5-10 meter accuracy, advanced techniques like Real-Time Kinematic (RTK) and Precise Point Positioning (PPP) achieve centimetre-level precision despite challenges such as atmospheric delays and signal interference. Augmentation systems (e.g., WAAS, EGNOS, GAGAN) further enhance accuracy and integrity, ensuring reliability for safety-critical applications. The integration of GNSS with Inertial Navigation Systems (INS) overcomes standalone limitations—combining GNSS’s long-term stability with INS’s high-frequency, signal-denied operation—enabling robust navigation in challenging environments like urban canyons and tunnels. As GNSS adoption grows, its synergy with emerging technologies continues to drive innovation across sectors.
Keywords: GNSS, GPS, Galileo, RTK, PPP, INS, Augmentation Systems, Positioning, Navigation, Timing.
Introduction
Global Navigation Satellite Systems (GNSS) are satellite constellations which operates across multiple bands to provide the positioning, navigation, and timing (PNT) services worldwide. Each country has its own GNSS systems with unique characteristics. We can often see GPS from USA has been leading the front from many years and has paved the way for others to develop their own systems. Currently the most popular GNSS systems include GPS, GALILEO, GLONASS, BEIDOU, NAVIC, QZSS each offering global or regional Coverage.
GNSS technology has revolutionised various industries including transportation, telecommunication, surveying, defence, disaster management. There is no telecommunication device in the market rite now without the navigation functionality. In the transportation segment it has already became a mandatory equipment like airbags and seat belts for the consumers. More countries are also putting out regulations like eCall as a must have feature in all the vehicles.
GNSS Systems deliver precise positioning and Time synchronisation, with their performance hinging on accuracy and integrity. Standard GNSS offers 5-to-10-meter accuracy, while advanced techniques like Real-Time Kinematic (RTK) and Precise Point Positioning (PPP) achieve centimetre-level precision, despite challenges like atmospheric delays, multipath interference, and satellite geometry. Integrity ensures reliability by identifying faults, such as signal spoofing or satellite malfunctions, which is critical for safety-of-life applications like aviation and autonomous vehicles.
The implementation of Augmentation systems was an important turning point in providing accurate position and signal integrity. Various augmentation services are developed by each individual countries, like WAAS from USA, EGNOS from Europe, MSAS from Japan, GAGAN from India is few among them.
The integration of GNSS with Inertial Navigations Systems (INS) has created numerous applications that overcomes the limitations of each standalone system. While GNSS provides absolute positioning with long-term stability, its signals can be disrupted by obstructions (e.g., urban canyons, tunnels) or interference. Conversely, INS—which relies on accelerometers and gyroscopes—delivers continuous, high-frequency navigation in GNSS-denied environments but suffers from error drift over time due to sensor biases. By combining GNSS absolute positioning with INS short-term precision, integrated systems deliver reliable, continuous, and accurate navigation—even in challenging conditions.
GNSS Architecture
Understanding the core components is essential before exploring different GNSS systems. The system architecture of a GNSS constellation consists of 1) user segment, 2) Space Segment and Ground Segment. These three systems work together to provide accurate positioning services worldwide.

Space Segment
The Space Segment is a core component consisting of a constellation of satellites orbiting the Earth to provide global positioning, navigation, and timing (PNT) services. These satellites transmit precise radio signals containing their orbital position and synchronized timing information, which are received and processed by ground-based or mobile receivers to determine user location. Most GNSS satellites operate in Medium Earth Orbit (MEO) (~20,000 km altitude), ensuring optimal global coverage and signal stability.
Control Segment
The Ground Segment serves as the control and monitoring backbone of Global Navigation Satellite Systems (GNSS), ensuring the accuracy, reliability, and integrity of navigation signals. This critical infrastructure consists of a global network of monitoring stations, control centres, and uplink antennas that work together to maintain optimal system performance. It measures the pseudorange and carrier phase observations from multiple ground stations. It also creates system almanacs and correction parameters.
User Segment
The User Segment represents the final link in GNSS, comprising the receivers and applications that utilize satellite signals to determine position, velocity, and time (PVT). This segment bridges GNSS technology with end-users across industries, from everyday smartphones to high-precision military systems. It locks onto satellite signals and compensate for movement. The User segments adaptability enables GNSS to serve billions worldwide, driving innovation in IoT, autonomy and beyond.
Constellation Design
GNSS constellation design involves the arrangement of satellites in space to ensure continuous and reliable global or regional navigation coverage. Most systems, such as GPS and Galileo, deploy satellites in Medium Earth Orbits (MEO) at approximately 20,000 km altitude to optimize global visibility. The design ensures that at least four satellites are always visible from any point on Earth, maintaining strong geometric positioning accuracy.

Satellite navigation systems utilize various orbit types to achieve global or regional coverage, optimize signal strength, and ensure system reliability. Here is a breakdown of the primary orbit types used in GNSS. Each orbit type addresses specific needs, ensuring GNSS systems meet demands from consumer navigation to military precision.
GNSS Bands

GNSS signals are transmitted in specific frequency bands, each optimized for performance, accuracy, and resistance to interference. These bands are categorized by their wavelength (e.g., L-band, C-band) and are shared across different GNSS systems (GPS, Galileo, GLONASS, BeiDou) with slight variations. GNSS bands ensure global coverage, resilience, and backward compatibility, powering everything from everyday navigation to precision agriculture and defence systems.
GNSS Signals
All GNSS signals consists of a carrier wave, Spreading Code and Navigation Data. A carrier wave is the foundational high-frequency radio signal transmitted by GNSS satellites, which serves as a “vehicle” to deliver navigation data and timing information to receivers on Earth. It is a pure sinusoidal wave (e.g., 1575.42 MHz for GPS L1) that carries no information on its own but is modulated to embed critical data. A spreading code (or pseudorandom noise code, PRN code) is a fundamental component of GNSS signals. It distinguishes signals from different satellites based on unique codes. It enables noise resistance by spreading the signals over a wider bandwidth, improving interference/jamming resilience and supports in calculating precise timing by allowing receivers to measure signal travel time.
Spreading codes are of 3 types
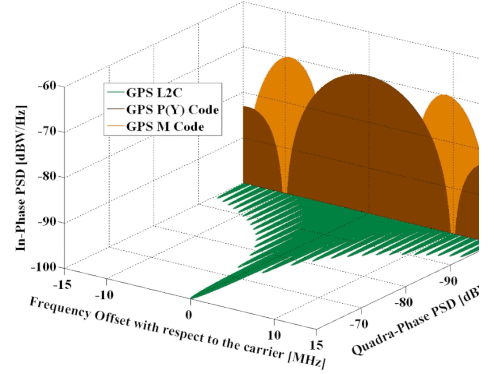
- Coarse/Acquisition (C/A) Code: Short, civilian-accessible code (e.g., GPS L1 C/A: 1.023 MHz, Gold code). Faster acquisition but vulnerable to spoofing.
- Precision (P/Y/M) Code: Long, encrypted military codes (e.g., GPS P-code: 10.23 MHz). Higher accuracy and anti-jamming protection.
- Modernized Codes: GPS L2C, L5: Longer, more robust codes for civilian use. Galileo E1: Uses Composite BOC (CBOC) for better multipath resistance.
Example: A GPS receiver distinguishes between Satellite #12 (PRN12) and Satellite #15 (PRN15) by their unique Gold codes, even though both transmit on the same L1 frequency (1575.42 MHz).
GNSS Constellations
GPS (Global Positioning System)
The Global Positioning System (GPS), developed and maintained by the United States, is the world’s most widely used satellite navigation system. It consists of a constellation of at least 24 operational satellites in Medium Earth Orbit (MEO) at approximately 20,180 km altitude, distributed across six orbital planes to ensure global coverage. GPS satellites transmit precise timing and orbital data on multiple frequencies (e.g., L1, L2, and L5), enabling receivers to calculate their exact position, velocity, and time (PVT) through trilateration.
Originally designed for military use, GPS now serves civilian, commercial, and scientific applications, from smartphone navigation and aviation to precision agriculture and disaster management. Modern GPS incorporates advanced features like anti-jamming capabilities, improved signal accuracy (L5 for civilian use), and integration with other GNSS systems (e.g., Galileo, GLONASS) for enhanced reliability. Operated by the U.S. Space Force, GPS remains a cornerstone of global infrastructure, supporting everything from financial transactions to autonomous vehicles.
All Signals and time information are derived from same clock with a frequency of 10.23MHz to assure synchronisation.
- Uses Caesium and Rubidium clocks.
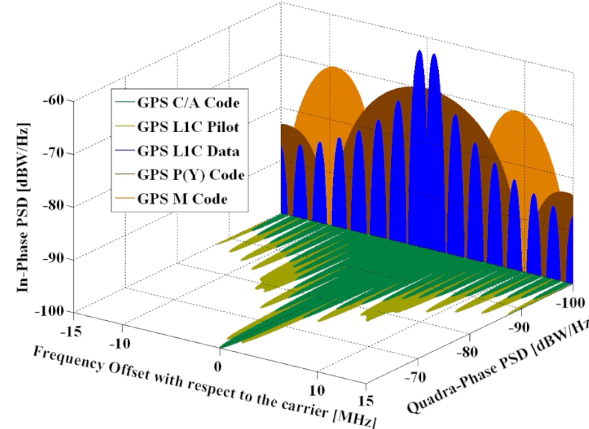
- The L1 is modulated with PRN Codes using a technique known as Binary phase shift keying (BPSK) with rectangular shape pulses.
- L1 C/A with 1.023Mbit/sec and length of code is 1 millisecond. Accuracy will be around .3 to 3 meters.
- L1 P/Y with 10.23Mbit/Sec long PRN code. Due to this accuracy will be high around 10 to 30 cm.
- BPSK with a PRN code sequence provides a broad bandwidth.
- GPS L1 frequency contains Navigation message and Coarse/Acquisition Code (C/A)
- L1C is a new band designed for interoperability with Galileo E1.
- L2 operates at 1227MHZ frequency it is a newer band than L1 and has better accuracy than L1 also it has better penetration capabilities.
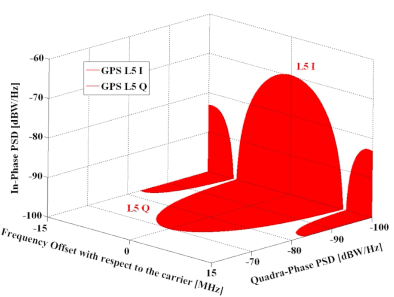
- Signal Frequencies Supported: Uses L1 (1575.42 MHz), L2 (1227.6 MHz), and L5 (1176.45 MHz) bands.
GLONASS (Global Navigation Satellite System – Russia)
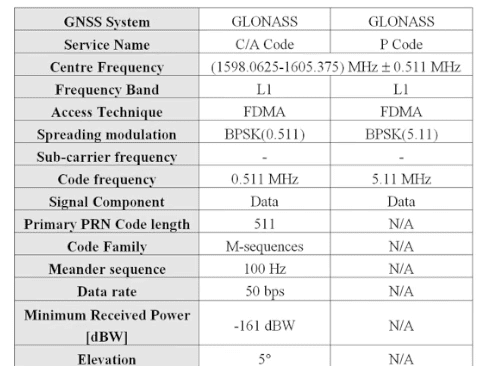
Developed by Russia, GLONASS is a global satellite navigation system that serves as an alternative and complement to the GPS. The system consists of 24 operational satellites in Medium Earth Orbit (MEO) at an altitude of approximately 19,100 km, spread across three orbital planes inclined at 64.8 degrees. Unlike GPS, which uses Code Division Multiple Access (CDMA), GLONASS originally employed Frequency Division Multiple Access (FDMA) for signal transmission, though modernized satellites now also support CDMA signals for improved interoperability.
- Constellation: 24 satellites in MEO at ~19,100 km altitude.
- Orbital Planes: Three orbital planes with eight satellites each.
- Signal Frequencies: Uses FDMA (Frequency Division Multiple Access) on L1 (~1602 MHz) and L2 (~1246 MHz) bands, unlike GPS’s CDMA.
- Control Segment: Operated by Roscosmos with ground stations mainly in Russia.
Galileo (European Union)
Developed by the European Union and operated by the European Space Agency (ESA), Galileo is Europe’s state-of-the-art global satellite navigation system (GNSS), designed to deliver high-precision positioning, navigation, and timing (PNT) services worldwide. Unlike GPS (USA) and GLONASS (Russia), Galileo is civilian-controlled, emphasizing transparency, reliability, and interoperability with other GNSS systems.
- Constellation: 24+ operational satellites in Medium Earth Orbit (MEO) at ~23,222 km altitude, with 6 in-orbit spares for redundancy.
- Signals: Transmits on E1 (1575.42 MHz), E5 (1191.795 MHz), and E6 (1278.75 MHz) bands, using CDMA (Code Division Multiple Access) for enhanced accuracy and anti-jamming resilience.
Advantages Over Other GNSS:
- Superior Accuracy: Dual-frequency (E1+E5) enables <1-meter precision.
- Interoperability: Designed to work seamlessly with GPS, GLONASS, and BeiDou.
- Integrity Monitoring: Real-time error alerts for safety-critical applications (e.g., aviation).
Galileo powers diverse applications, from autonomous vehicles and smart agriculture to aviation safety and emergency services, reinforcing Europe’s technological independence and global navigation standards.
Control Segment: Managed by the European GNSS Agency (GSA) with multiple ground stations.

BeiDou (China)
The BeiDou Navigation Satellite System (BDS), China’s global navigation system, provides comprehensive positioning, navigation, and timing (PNT) services through a hybrid constellation of MEO, GEO, and IGSO satellites. The system broadcasts signals across multiple frequencies, including B1C (1575.42 MHz, interoperable with GPS L1/Galileo E1) for civilian use, B2a (1176.45 MHz, aligned with GPS L5) for high-precision applications, and B3 (1268.52 MHz) for encrypted military signals. Unique among GNSS systems, BeiDou offers Short Message Communication (SMS), enabling text transmission via satellites—a critical feature for disaster response in remote areas. With services ranging from free meter-level accuracy (Open Service) to secure government/military (Authorized Service), BeiDou rivals GPS and Galileo in global adoption, supporting applications like autonomous vehicles, maritime navigation, and smart agriculture.
- Constellation: Hybrid system with GEO, IGSO, and MEO satellites (~35 satellites total).
- Orbital Planes: Three GEO, three IGSO, and 24 MEO satellites (~21,500 km altitude).
- Signal Frequencies: Uses B1 (1561.098 MHz), B2 (1207.14 MHz), and B3 (1268.52 MHz) bands.
- Control Segment: Operated by the China Satellite Navigation Office.

NavIC (India)
NAVIC, also known as the Indian Regional Navigation Satellite System (IRNSS), is India’s indigenous satellite navigation system developed by the Indian Space Research Organisation (ISRO). Designed to provide accurate positioning and timing services over India and its surrounding regions (up to 1,500 km beyond its borders), NAVIC ensures strategic autonomy and reduces dependence on foreign GNSS systems like GPS or GLONASS.
Key Features of NAVIC:
- Coverage: Focused on India and adjacent areas, with seven satellites (3 GEO + 4 IGSO) ensuring continuous service.
- Frequency Bands:
- L5 (1176.45 MHz): For standard positioning (civilian use).
- S-band (2492.028 MHz): Unique to NAVIC, enhancing signal reliability in challenging environments.
It provides Standard Positioning Service (SPS) for civilian use (~5-10 m accuracy) and Restricted Service (RS) for authorized/military users. It is used in transportation (aviation, maritime), disaster management, agriculture, and defence operations.
NAVIC exemplifies India’s advancements in space technology, supporting both civilian infrastructure and national security. Future expansions may include integration with other GNSS for broader interoperability.

Types of Errors

Satellite Clock Errors
Cause: Even though satellites use highly accurate atomic clocks, they can still drift over time due to aging, temperature changes, or other factors.
Impact: Clock errors cause inaccuracies in the time stamp of the transmitted signal, leading to errors in the calculated distance (pseudorange) between the satellite and the receiver.
Mitigation: GNSS systems continuously monitor and correct satellite clock errors using ground control stations. Receivers can also use signals from multiple satellites to estimate and correct for clock errors.
Satellite Orbit Errors (Ephemeris Errors)
Cause: The satellite’s reported position (ephemeris data) may not perfectly match its actual position due to gravitational forces, solar radiation pressure, or other perturbations.
Impact: Errors in the satellite’s position lead to inaccuracies in the calculated pseudorange and, consequently, the receiver’s position.
Mitigation: Ground control stations monitor satellite orbits and upload corrected ephemeris data to the satellites. Advanced receivers use differential GNSS (DGNSS) or Satellite-Based Augmentation Systems (SBAS) to correct for orbit errors.
Ionospheric Delay
Cause: The ionosphere (a layer of the Earth’s atmosphere) contains charged particles that slow down and bend GNSS signals.
Impact: Ionospheric delay causes errors in the measured pseudorange, especially for single-frequency receivers.
Mitigation: Dual-frequency receivers can correct for ionospheric delay by comparing signals at two different frequencies. Models and correction data (e.g., from SBAS) are also used to reduce ionospheric errors. Example ionospheric model is Klobuchar.
Tropospheric Delay
Cause: The troposphere (the lowest layer of the Earth’s atmosphere) contains water vapor, humidity and other gases that slow down GNSS signals.
Impact: Tropospheric delay introduces errors in the measured pseudorange, particularly for low-elevation satellites.
Mitigation: Tropospheric models and correction algorithms are used to estimate and reduce these errors.
Multipath Errors
Cause: GNSS signals can reflect off surfaces (e.g., buildings, ground, water) before reaching the receiver, creating multiple signal paths.
Impact: Multipath interference causes errors in the measured pseudorange and carrier phase.
Mitigation: Advanced antennas and signal processing techniques are used to minimize multipath effects. Avoiding areas with reflective surfaces (e.g., near tall buildings) can also help.
Receiver Noise
Cause: The receiver’s hardware and software can introduce noise or errors in the signal processing.
Impact: Receiver noise affects the accuracy of pseudorange and carrier phase measurements.
Mitigation: High-quality receivers with low noise levels are used for critical applications.
Trilateration
Trilateration is the geometric method used by GNSS receivers to determine their precise location by measuring distances from multiple satellites. Unlike triangulation (which uses angles), trilateration relies solely on distance measurements from known reference points (satellites).
How Trilateration Works in GNSS:
- Distance Measurement: The receiver calculates its distance (pseudorange) from each satellite by measuring the time delay between signal transmission and reception (multiplied by the speed of light). Requires synchronization with the satellite’s atomic clock (or clock error correction).
- Satellite Positions: Each satellite broadcasts its exact orbital location (ephemeris data) in the navigation message.
- Intersection of Spheres: Each distance defines a sphere around the satellite. Minimum 3 satellites are needed for a 2D position (latitude/longitude). 4+ satellites are required for 3D positioning (latitude/longitude/altitude) and to resolve receiver clock errors.
Applications and Compatibility
Aviation & Maritime: GPS and Galileo are widely used for international navigation.
Military: GPS (U.S. military), GLONASS (Russian forces), and BeiDou (PLA) have encrypted signals.
Smartphones & IoT: Most modern devices support multi-GNSS (GPS + GLONASS + Galileo + BeiDou) for better accuracy.
Autonomous Vehicles: High-precision GNSS like Galileo and RTK-enhanced GPS are critical.
Conclusion
While all GNSS systems provide essential PNT services, they differ in constellation design, signal technology, accuracy, and regional vs. global coverage. GPS remains the most widely used, Galileo offers superior civilian accuracy, GLONASS performs better in polar regions, and BeiDou dominates in Asia. Regional systems like NavIC and QZSS enhance local precision. The future of GNSS lies in interoperability, with multi-constellation receivers improving reliability and accuracy for users worldwide.
If you want to go deeper into these topics (RTK, PPP, INS integration, error modeling and practical applications), you can explore our dedicated course: GNSS Systems – SEAC.
References
GNSS Systems – Seac Courses – https://seac-business-school.mykajabi.com/products/gnss-systems
GNSS – https://www.princeton.edu/~alaink/Orf467F07/
GPS – Essentials of Satellite Navigation – https://content.u-blox.com/sites/default/files/gps_compendiumgps-x-02007.pdf
Jean-Marie Zogg